

فهرست این مقاله ( با کلیک روی هر عنوان به آن قسمت منتقل می شوید)
کاتالوگ و دفترچه فارسی اینورتر اینوت
اینورتر اینوت ساخت چین، از جمله ابزار هایی است که می توان به وسیله آن حرکت موتور الکتریکی را کنترل نمود. مدل های مختلف این برند، با پیشوند Good Drive ساخته میشوند و همچنین این محصولات در سه نوع تکفاز به سه فاز 220 ولت، تکفاز 220 به سه فاز 380 ولت و سه فاز به سه فاز 380 ولت تولید می شوند. در ادامه به معرفی انواع اینورتر اینوت می پردازیم. همچنین کاتالوگ فارسی اینورتر INVT نیز وجود دارد که به کمک آن میتوان از مشخصات این محصول آگاه شد و پارامتر های تنظیمی آن را شناسایی کرد.

انواع اینورترهای INVT
اینورتر GD10 اینوت : در دو نوع تک فاز و سه فاز تا توان 2.2 کیلووات و کاربری عمومی صنعتی سبک و نیمه سنگین تولید میشود و همچنین برای دستیابی به کاتالوگ فارسی اینورتر INVT GD10 میتوانید از سایت ماناموتور استفاده کنید.

اینورتر GD20 اینوت: در دو نوع تک فاز تا 2.2 کیلووات و سه فاز تا توان 110 کیلووات و کاربری سنگین
اینورتر GD200 اینوت: در یک نوع سه فاز از توان 4 کیلووات تا 500 کیلووات و کاربری عمومی و سنگین مخصوص پمپ و فن
اینورتر GD350 اینوت : در یک نوع سه فاز 1.5 کیلووات تا توان 500 کیلووات و کاربری های سبک و سنگین پیشرفته
در ادامه به معرفی ویژگی های شاخص این محصولات از روی کاتالوگ اینورتر INVT پرداخته ایم:
مد کنترلی V/F
این مد کنترلی ساده ترین مد راه اندازی موتور میباشد که با تغییر ولتاژ و فرکانس سرعت موتور را کنترل میکند؛ در این روش، ولتاژ و فرکانس با یک شیب ثابت به حداکثر مورد نیاز میرسند. در این مد کنترلی با تغییر دادن نسبت ولتاژ به فرکانس، میتوان سرعت موتور را کنترل کرد و زمانی که مقدار جریان بیشتر از حد مجاز باشد، فرکانس تغییر میکند. هر کنترلر، نسبت V/F را به یک بلوک فرمان تبدیل میکند. همه اینورتر های برند اینوت از این روش پشتیبانی میکنند.
در این نوع مد کنترلی هیچ گونه فیدبکی وجود ندارد و به همین علت دقت این مد نسبت به سایر روش ها کمتر است. برای مثال اگر ولتاژ ورودی موتور 380 ولت و فرکانس دریافتی 50 هرتز باشد، نسبت V/F کاملا ثابت است و اگر فرکانس درایو را به 25 هرتز برسانیم، در خروجی شاهد ولتاژ 190 ولت خواهیم بود.
مد کنترل برداری بدون سنسور یا SVC
عبارت سنسورلس به این معناست که هیچ انکودر یا سنسور فیزیکی برای فیدبک از حرکت الکتروموتور وجود ندارد. در این حالت درایور برای کنترل پالس و فرکانس خروجی، از جریان الکتریکی که توسط مصرف کننده کشیده شده، استفاده می کند. این مد کاری نسبت به حالت V/F دقت بالاتری دارد و در دور های پایین هم گشتاور موتور به نسبت بالاست و عملکرد مناسبی دارد.
مد کنترلی SVC در واقع کنترل بردار شار جریان ورودی است که در آن دامنه، فرکانس و فاز منبع ولتاژ متناوب موتور تغییر میکند تا سرعت موتور در حد دلخواه حفظ شود. این روش راه حل ساده و کم هزینهتر نسبت به نصب و اتصال انکودر بوده و البته به اندازه مد Close Loop دقیق نیست. از بین اینورترهای اینوت سری های GD20 و GD200 از این مد کنترلی پشتیبانی میکنند.
مد کنترل برداری حلقه بسته (Closed Loop Control with Encoder)
این روش کنترلی برای راه اندازی نیاز به استفاده از انکودر دارد و کامل ترین مد کاری برای درایور موتور می باشد. در این مد به علت دقت بسیار بالای درایور، عملکردی شبیه سروو موتور خواهیم داشت. این روش از دقت و گشتاور متناسب بار برای کنترل موتور الکتریکی کمک میگیرد و ایرادات مد های کنترلی قبل را به خوبی رفع کرده است. البته راه اندازی این مد کنترلی نسبتا پیچیده بوده و نیاز به دانش و مهارت بیشتری دارد. از بین اینورترهای اینوت سری GD350 از این مد کنترلی پشتیبانی میکنند.
کنترلر PID داخلی
برخی مدل های اینورتر اینوت دارای کنترلر PID داخلی هستند. این نوع کنترل اینورتر یکی از روشهای کنترل حلقه بسته است که در آن سه روش تناسبی، انتگرالی و مشتقگیری با هم ترکیب شدهاند. همچنین این روش موجب پایدار نگه داشتن سیستم حلقه بسته میشود. پارامتر P در این نوع روش کنترلی از Proportional به معنای تناسبی گرفته شده و در آن با توجه به میزان خطا میتوان خروجی را کنترل کرد و در نتیجه برای اینکه بتوان سیستم را با ثبات نگه داشت، همیشه به وجود مقداری خطا در سیستم وجود نیاز داریم.
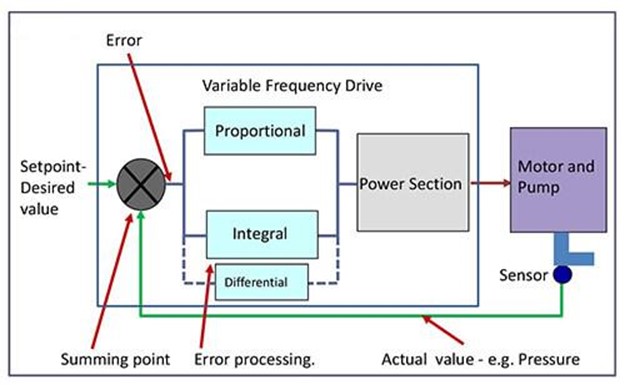
پارامتر I به Integrator یا انتگرال اشاره دارد و به معنای جمع خطای سیستم در طول زمان است که بیانگر مفهوم انتگرال زمانی می باشد و می تواند خطای سیستم را در طول زمان به صفر برساند. با اضافه کردن عملکرد انتگرالی به عملکرد تناسبی می توان انحراف را کاهش داد. همه اینورتر های برند اینوت دارای این ویژگی می باشند.
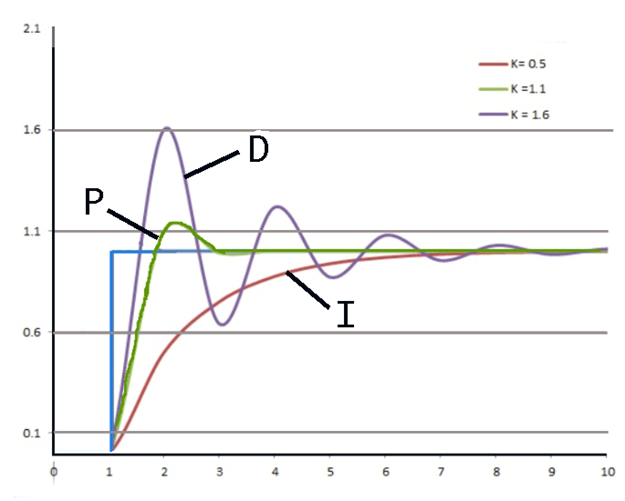
پارامتر D به Derivative یا مشتق اشاره میکند که موجب به نوسان افتادن سیستم و نیز حساس شدن آن به تغییرات ناگهانی و نویز می شود و به همین علت زیاد مورد استفاده قرار نمیگیرد. در شکل زیر به مقایسه خطای این سه پارامتر پرداخته ایم:
مقاومت ترمز DC
هنگامی که موتور، بار سنگینی را حمل کند، در هنگام توقف به علت این سنگینی سرعت شفت از سرعت سنکرون بیشتر خواهد شد و در این لحظه موتور مانند ژنراتور عمل میکند و به درایو ولتاژ می دهد که موجب آسیب رساندن به درایو خواهد شد. در این شرایط حتما باید از مقاومت ترمز استفاده کنیم که در مدار قرار گرفته تا این انرژی در مقاومت به صورت گرما تخلیه شود.

فیلتر EMC داخلی
فیلتر EMC برای کاهش نویزهای الکترومغناطیسی و همچنین اعوجاجات منبع تغذیه که ممکن است موجب سوختن درایو شوند، مورد استفاده قرار می گیرد. همه اینورتر های برند اینوت دارای این فیلتر هستند.



.webp)


